Tracking Optimization
Tracking optimization is a module within Treatment Optimization that aims to find optimal control strategies to reproduce experimental motion data while minimizing discrepancies between predicted and observed kinematic, kinetic, and muscle activation (if applicable) data. It is a powerful tool for understanding and analyzing human movement, enabling researchers and practitioners to optimize control strategies and generate accurate predictions.
Inputs
- OpenSim model file (.osim)
- NMSM Pipeline model file (.osimx) (Optional)
- Processed data
- If not using synergy controls, processed data should be both the tracked quantities and initial guess directories.
- NCP results directory (Only if using synergy controls)
- If using synergy controls, NCP results should be the initial guess directory.
- GPOPS II settings file (.xml)
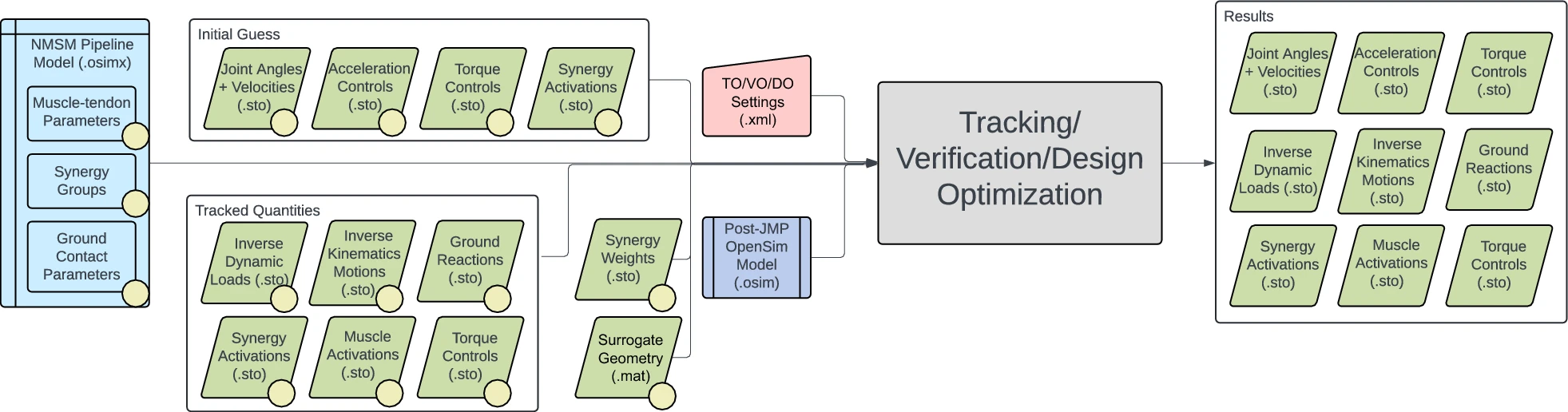
Outputs
- IKData: Joint angles
- IDData: Joint loads
- GRFData: Ground reactions
- accelerations.sto: State accelerations
- combinedActivations.sto: Muscle activations produced by synergy controls
- replacedExperimentalGroundReaction.sto: Modeled ground reactions with moments reported about the midfoot superior marker projected onto the ground
- states.sto: State coordinate positions and velocities
- torqueControls.sto: Torque control signals
- synergyCommands.sto: Time-varying synergy commands
- synergyWeights.sto: Time-invariant synergy weights
Importance
The primary goal of Tracking Optimization is to ensure that the motion being used to design a treatment is dynamically consistent. If the designed treatment doesn't involve a dynamically consistent motion, it is not guaranteed that the treatment would actually work on the subject in real life.