Ground Contact Personalization
Ground Contact Personalization (GCP) optimizes personalized physical properties of a model describing contact between the ground and a subject's shoe or foot. These models enable the prediction of ground reaction forces and moments for new kinematics. If the model being personalized does not use external reaction forces, this tool should be skipped.
Inputs
- Model file (.osim or .osimx)
- Processed data
- Ground reaction forces required for this tool
- Inputs must contain forces, moments, and force plate electrical center
- Ground reaction forces required for this tool
- The motion file and ground reaction forces file must have matching time columns at every point within a tolerance of 0.005 seconds.
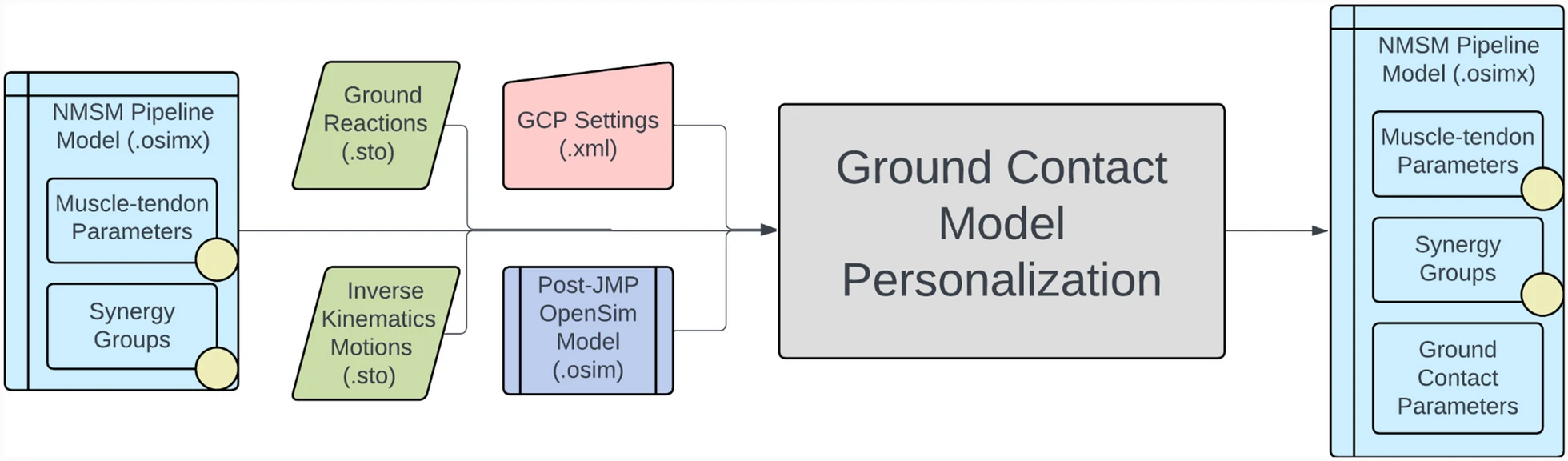
Outputs
- Updated NMSM Pipeline model file containing contact surface parameters (.osimx)
- New ground reaction file with an updated electrical center or force plate orientation (.sto)
Design Variables
GCP supports six types of design variables. In general, we recommend including the following:
- Spring constants: the stiffness values at each spring marker
- Viscous friction coefficient: the viscous coefficient of friction used to calculate horizontal ground reaction forces
- Kinematics B-spline coefficients: deviation nodes defining changes from experimental kinematics
- Resting spring length: the distance at which spring markers come into contact with the floor. This should only be enabled during the first stage, as described in the section below.
These design variables may also be used:
- Damping factor: a shared coefficient used to calculate linear damping force at spring markers
- Dynamic friction coefficient: a friction coefficient used for an alternative friction model to the viscous friction model
The viscous friction model uses linear damping to calculate horizontal ground reaction forces from spring marker horizontal velocities. The dynamic friction coefficient is used with a tanh() function, and it may be used instead of or in addition to the viscous friction model.
Background
This tool is primarily based on a 2016 paper by Jackson et al. It represents foot-ground contact with planes of springs attached to the toe and hindfoot bodies and optimizes parameters to produce personalized models.
Significance
Using personalized ground-contact models to predict reaction forces and moments, it is possible to calculate a subject's joint moments during predicted kinematics. This is particularly useful when a model is used for treatment optimization or other optimal control problems because new kinematic states are produced.